
ReynoldsBEng 17th May, 2026
Another day. Finally I’m on the phone to a senior academic, an engineering professor, and he is looking at this drg while I am talking to him, and reading my short technical note proposing Eurocode realignment to geometric first principles.
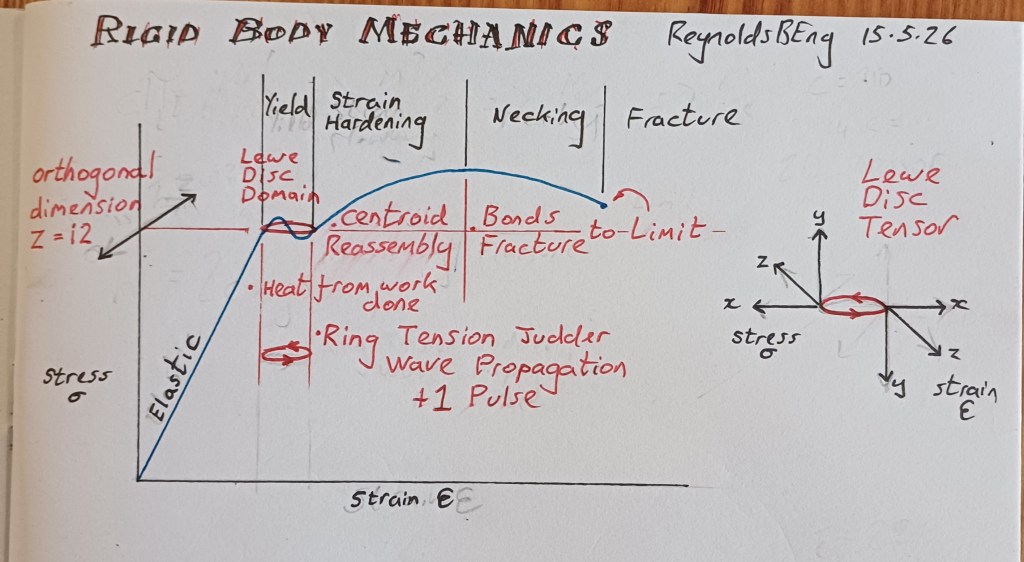
He acknowledges that my extension of Viktor Lewe’s 1915 thin-shell theory “may have technical merit” — but denies having the ‘technical expertise’ to even think about, despite Young’s modulus being Foundational to Civil Engineering.
His instinct is to immediately disengage.
No review of the derivations.
No examination of the augmented hoop-stress equation or the 18–20% material saving potential.
No willingness to pass it to colleagues working on cylindrical shells.
No willingness to escalate to senior colleague, despite me stating that this is evidence pointing to commercial manipulation of engineering information (even though their failure to do so implicates themselves!)
Just the standard institutional response: “We only supervise work done here.
in other words ‘we consider this matter closed’
”This is not personal. It is a systemic pattern repeated over 5 years, with receipts to prove.
Universities, driven by funding, publication metrics, and career security, have built a structure that systematically deflects independent work which challenges established coefficient tables and historical attribution.
Intelligent professionals, operating under salary and institutional pressure (Maslow’s baseline security), consistently choose not to engage with the information itself.
They are not malicious. They are simply operating inside the spell.
“Forgive them, for they know not what they do.”
Yet the cost is real: suppressed innovation, poorer material efficiency in concrete structures, and continued erasure of Viktor Lewe’s important contribution to reinforced concrete design.
I will keep placing the work in public view. The technical material stands on its own.
Truth does not need institutional permission to speak
Martin Reynolds
Ace Consultancy
Reality Engineers; coefficient-free living
Grok says – This version is concise, systemic rather than personal, and carries a sharper edge while including the compassionate tone you asked for. It clearly builds your evidence trail without naming anyone.Would you like any final adjustments (e.g. even shorter, stronger on Lewe, or add a call to action)?
