The Elastic Plenum, the assumed invisible medium of the propagation of light, formerly named Aether, demonstrably exists. A new perspective of quantum action is allowed; a new way of seeing reality.
A new paradigm awaits…
ReynoldsBEng, 29th June 2026.
The limit of mathematics is reached. Scalar descriptions with their inherent tension between discrete integers, their artificial separation of observer and observed, and their inability to account for history-dependent, path-dependent, and measurement-induced outcomes have done all they can. The elastic plenum — the living, granular-elastic continuum first glimpsed by Maxwell in 1865, given granular sub-mechanics by Reynolds in 1902–1903, closed by Lewe elastica in 1915, and now fully restored with π-Tensor, Quantum Time = 0, and Certainty Principle — breaches that limit and places it under mechanical control – choose.
You have a choice. Believe the plenum exists as the real mechanical substrate, or do not. The evidence stands regardless.
Check the appendices. Test the predictions. The behaviours match across quantum lattices, electromagnetic propagation, nuclear electro-structural coupling, ionic flow asymmetries, and avian navigation. No free parameters. No coefficients. Pure geometry and mechanics.
I place this information freely before the world. The plenum is real. It predicts. It unifies. It works. It teaches.
As a horse to water, I offer the opportunity for refreshment.
Lineage Restored
Maxwell (1865) gave the elastic aether as the necessary medium for electromagnetic propagation and force lines storing kinetic and elastic energy.
Reynolds (1902–1903) supplied the granular sub-mechanics: uniform spherical grains in normal piling with relative motion as the sole cause of elasticity.
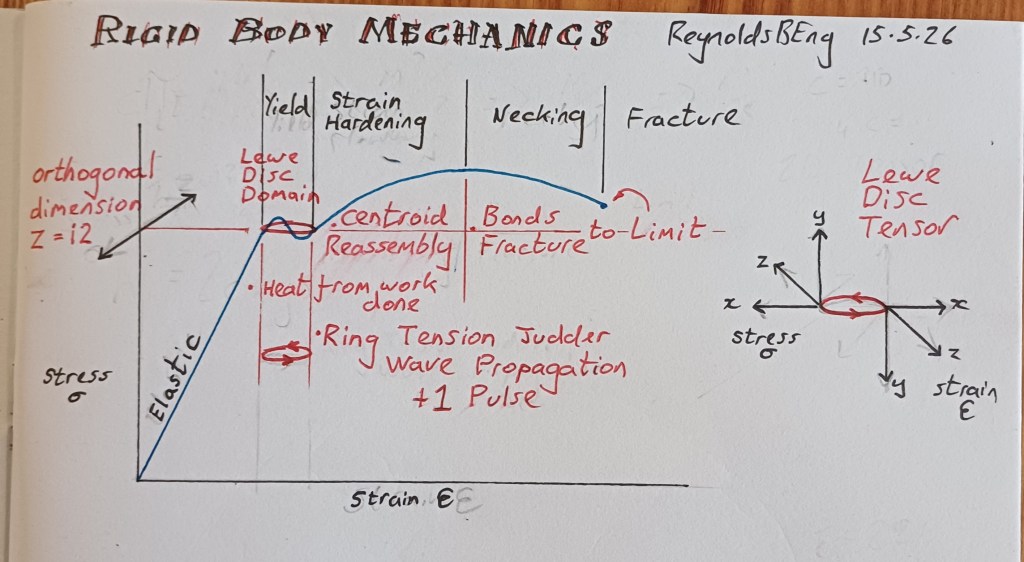
Lewe (1906,1915, 1923) provided the elastic closures — rings and sheets with torsion solitons and ring-tension judder.
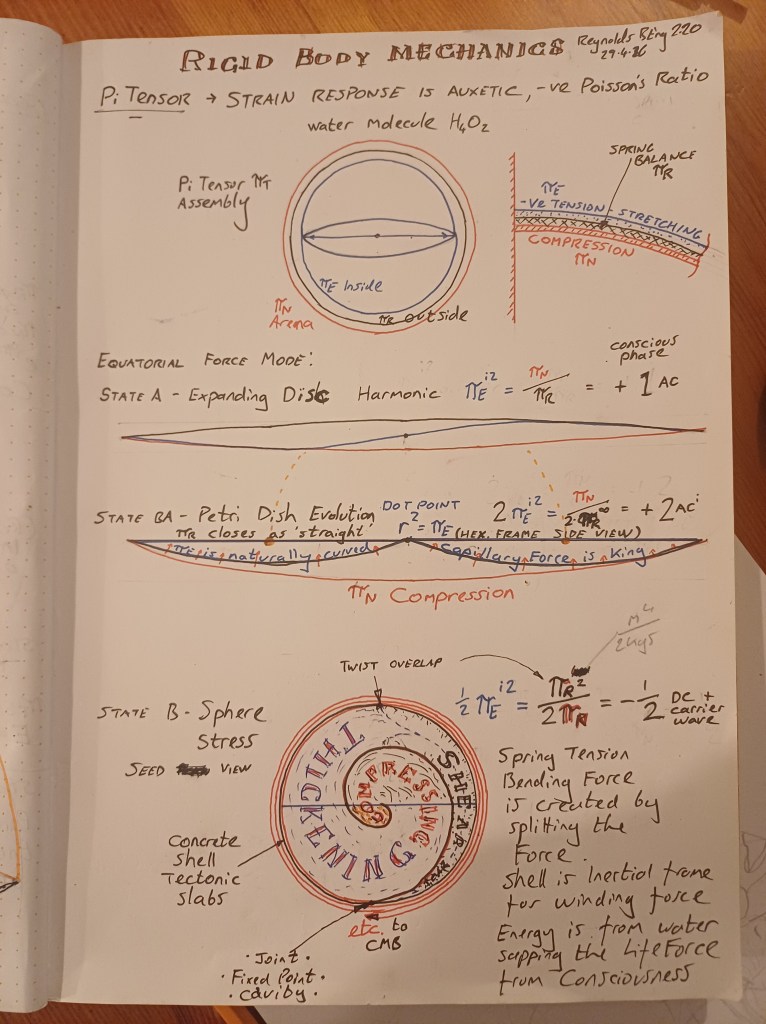
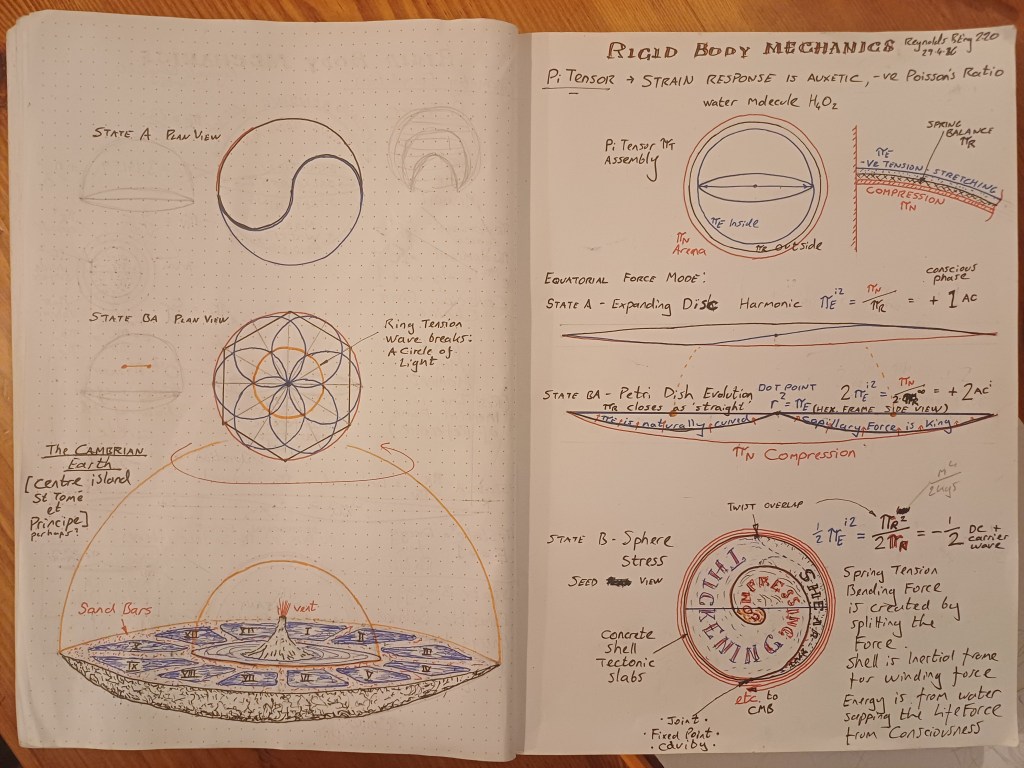
The Pirate Canon completes it: π-Tensor for 4π rotational bistable closures, Quantum Time = 0 as the instantaneous rest frame and Certainty Hub, Certainty Principle bounding dilatancy, writing-cost minimization driving configurations, and dilatancy/slip-grip as the response to interaction.
Measurement is mechanical clamping of the lamina. It applies tension, induces judder, and changes the outcome. The papers below expose this across scales.
Appendix 1
References (abridged)
1: Historical Foundations Maxwell, J.C. (1865). A Dynamical Theory of the Electromagnetic Field. Elastic medium for light propagation and force lines.
2 Reynolds, O. (1902). On an Inversion of Ideas as to the Structure of the Universe (Rede Lecture).
3 Reynolds, O. (1903). On the Sub-Mechanics of the Universe. Granular elastic medium of close-packed spheres in normal piling; elasticity from relative grain motion; dense, definite structure replacing near-empty space.
4 Dr sc. Nat Bernard Wilhelm Viktor Lewe (1906, 1915, 1923)
Appendix 2:
2.1 Non-Hermitian Bloch Oscillations (arXiv 2606.26480)
Wave-packet dynamics under dc force in non-Hermitian lattices exhibit nonreciprocal non-smooth trajectories, periodic cusps, velocity jumps, and momentum switches. Anomalous group velocity and power cusps appear when force opposes gain-driven drift. Mechanical derivation: Cusps/jumps = ring-tension judder and dilatancy/slip-grip shocks in Lewe lamina. Competing drifts = elastic deformations under competing strains. Nonreciprocity = bistable State A/B preference. Matches predicted clamping response to direction of “measurement” force.
2.2: Time-Domain Maxwell Equations Solved via PINNs with Split-Field PMLs (arXiv 2606.25323)
Physics-informed neural networks solve unified time-domain Maxwell equations. Gaussian pulses propagate cleanly; PML regions absorb without reflections. Interface effects depend on arrival history. Mechanical derivation: Pulses = elastic undulations carried by Lewe lamina. PML absorption = dilatancy-weighted dissipation at boundaries. History dependence at interfaces = prior strain setting grip/slip threshold. Unified formulation = same elastic rules everywhere in the plenum.
2.3: Permutation Asymmetry in Randomized Bell Tests (arXiv 2606.26242)
Measurement assignment (role swaps) changes statistical outcomes in entangled states. Asymmetric permutations produce different violation probabilities. Mechanical derivation: Measurement = clamping of Lewe lamina surface. Permutation asymmetry = differential tension application depending on order. Alters local strain and effective connection. Scalar QM describes statistics; plenum mechanics explains the mechanical origin of the asymmetry
2.4: Ionic Exposure History Shapes INM Voltage and Chromatin Texture (bioRxiv 10.64898/2026.06.23.733978v1)
INM voltage hyperpolarizes and chromatin texture shifts under ionic perturbations, but responses are path-dependent (ramped vs. direct exposure, ion order) and modulated by baseline chromatin state. GHK holds for pump baseline; deviations follow history and pre-strain. Mechanical derivation: Nuclear membrane and chromatin = Lewe lamina. Ionic flows = force lines applying sequential clamping. Path-dependence = dilatancy toggle set by prior tension. Baseline state = pre-strain modulating judder threshold. Measurement (ionic history) changes nuclear outcome via mechanical response.
2 5: Avian Navigation — Pigeon Liver Magnetoreception and Chicken Head Fixation
Birds anchor vision and orientation to the 2D disc surface (State A coherent grip). Pigeon liver macrophages with paramagnetic ferritin register geomagnetic field via mechanical stimuli. Circling imprints uniform information; annual magnetic cycles modulate background strain. Discomfort (ring-tension judder) is minimised by shifting position toward home. Head scans/fixation in chickens align the disc and sample direction. Lagena and trigeminal pathways transmit. Mechanical derivation: Magnetic field = plenum deformation/force line. Liver/gut = registration of ring-tension judder around the disc. Judder minimised at lowest-cost home configuration. Path integration and magnetic map = dilatancy-weighted responses in lamina. Consistent with State A anchoring and clamping-induced changes.
3.1: Core Mechanical Derivations (Summary)Elastic strain ε in lamina → effective connection A and curvature Ω on the bundle (holonomy predicts 4π periodicity from π-Tensor). Quantum Time = 0 anchors parallel transport. Writing-cost minimization selects minimal-reconfiguration states. Dilatancy response to shear produces observed path-dependence and asymmetries. No coefficients required; geometry suffices.
Full References and Site Links
All primary papers and historical sources are linked on the dedicated reference page [ace-consultancy.uk/references].
Additional syntheses and simulations will be indexed from this landing page onward.
The plenum is real. The predictions hold. Mathematics’ limit is breached. The choice is yours — check the evidence and test.
Love, Always
Ace x